 Nauki ścisłe
Nauki ścisłe
Wyprowadzą roboty na prostą





Naukowcy z Instytutu Nauk Technicznych UMK opracowali algorytm, dzięki któremu mobilne roboty będą w stanie unikać ślepych zaułków i omijać przeszkody. Zwiększy to ich wydajność oraz pozwoli zaoszczędzić energię.
Dlaczego spacerując po mieście nie wchodzimy w ślepe uliczki, a przynajmniej zdarza nam się to bardzo rzadko, raczej tylko wtedy, gdy się zamyślimy? Dzięki naszej percepcji (widząc m.in. odpowiednie znaki i oceniając odległości) jesteśmy w stanie przewidzieć, że przed nami znajduje się przeszkoda – nie musimy wcale tego sprawdzać, idąc do końca ulicy. W odpowiednim momencie jesteśmy w stanie skierować się na odpowiedni tor, nie tracąc czasu na zawracanie.
- Na dokładnie takim zachowaniu bazowaliśmy, opracowując algorytm planowania ścieżki, który pozwolić mobilnym robotom omijać ślepe zaułki – tłumaczy dr hab. Tomasz Tarczewski, prof. UMK z Instytutu Nauk Technicznych UMK.

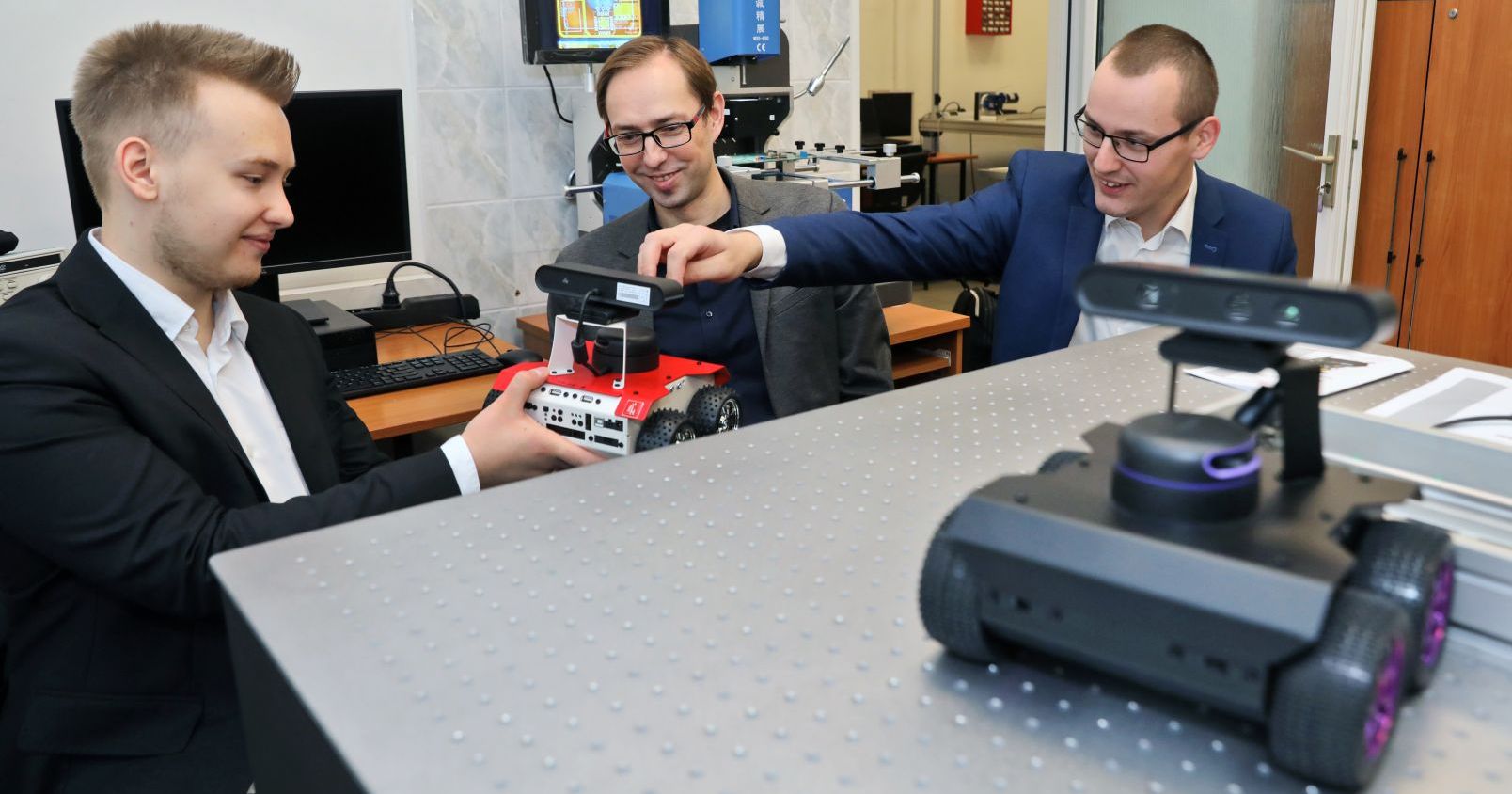
Do zespołu, który podjął się opracowania algorytmu, należą - oprócz prof. Tomasza Tarczewskiego - mgr inż. Rafał Szczepański oraz inż. Artur Bereit z Instytutu Nauk Technicznych (instytucja wchodząca w skład Wydziału Fizyki, Astronomii i Informatyki Stosowanej UMK). Na swoje badania otrzymali grant w konkursie INCOOP w ramach Inicjatywy Doskonałości – Uczelnia Badawcza. Wyniki zaś opublikowali w prestiżowym czasopiśmie "Energies" w artykule "Efficient Local Path Planning Algorithm Using Artificial Potential Field Supported by Augmented Reality".
Robot w impasie
Dlaczego zainteresowali się i postanowili rozwiązać właśnie ten problem?
W dzisiejszych czasach roboty mobilne są coraz częściej stosowane w magazynach oraz halach produkcyjnych. Pomimo specjalnych tras, algorytmów nadrzędnych koordynujących pracę wielu robotów na jednej hali, może się zdarzyć, że ścieżka robota będzie zablokowana. Ich głównym problemem jest bowiem częste wpadanie w tzw. ślepe zaułki – mówi prof. Tarczewski. - A przecież bezkolizyjny przejazd jest niezbędny dla bezpieczeństwa cyklu produkcyjnego.
Jednym ze sposobów rozwiązania tego problemu jest implementacja lokalnych algorytmów planowania ścieżki, ułatwiający omijanie różnego rodzaju przeszkód. Dzięki nim możliwe jest autonomiczne odblokowanie się robota i dalsza realizacja trasy.

Zasada działania większości z tych mechanizmów polega na wprowadzeniu dodatkowego algorytmu wyprowadzającego robota ze ślepego zaułka. W takim podejściu przebyta przez robota mobilnego droga wydłuża się ze względu na konieczność wycofania się i powoduje niepotrzebnie zużycie energii elektrycznej – wyjaśnia mgr inż. Rafał Szczepański. - W tym celu zastosowaliśmy czujnik LiDAR, czyli skaner laserowy dający informacje o odległościach od przeszkód wokół robota.
Następnie na podstawie odczytów zespół naukowców z Instytutu Nauk Technicznych opracował mechanizm predykcji ślepego zaułka: robot w czasie rzeczywistym porównuje informacje o dostępnej przestrzeni z własnymi gabarytami i na tej podstawie podejmuje decyzję o możliwości przejazdu. Aby robot zrezygnował z eksploracji nieprzejezdnego fragmentu, należy dostarczyć mu mechanizm do jego ominięcia.
Do tego zadania badacze wykorzystali "technologię rozszerzonej rzeczywistości" (ang. augmented reality, w skrócie AR).
- Mówiąc bardzo ogólnie jest to stworzenie dodatkowych wirtualnych obiektów i dodanie ich do rzeczywistości. Technologia ta jest powszechnie stosowana w różnych aplikacjach na smartfonach, tabletach, np. w grach mobilnych, aplikacjach do robienia zdjęć i filmów oraz zabawkach edukacyjnych – mówi inż. Artur Bereit.

W jaki dokładnie sposób zaprogramować w robocie mechanizm blokowania wjazdu w ślepy zaułek?
Należy rozszerzyć jego rzeczywistość o wirtualną ścianę, która uniemożliwi mu przejazd. W momencie wykrycia ślepego zaułka tworzona jest wirtualna ściana oraz dodatkowa przeszkoda z lewej lub prawej strony robota, w celu naprowadzenia go w odpowiednim kierunku – tłumaczy mgr inż. Szczepański. - Właśnie to nowatorskie i interdyscyplinarne połączenie robotyki mobilnej oraz technologii rozszerzonej rzeczywistości pozwoliło na opublikowanie wyników naszych badań w czasopiśmie "Energies".
Zespół badaczy z naszego uniwersytetu zaimplementował opracowany algorytm metody pól potencjałowych wspierany przez technologię rozszerzonej rzeczywistości w robocie mobilnym Husarion ROSbot 2.0 PRO oraz przeprowadził szereg badań laboratoryjnych, by wykazać skuteczność zaproponowanego rozwiązania. Wyniki są bardzo obiecujące – naukowcy wykazali znaczne polepszenie właściwości algorytmu pól potencjałowych powszechnie stosowanego w robotyce mobilnej.